- Pour connecter le monde de demain
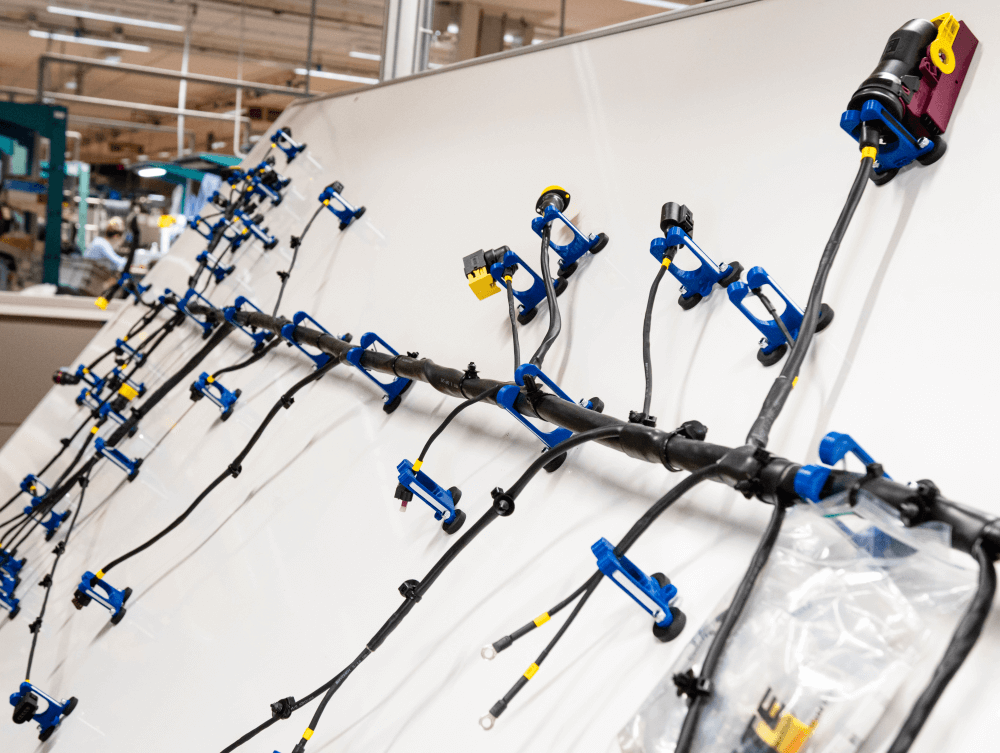
Faisceaux et harnais électriques pour systèmes de chirurgie robotique
La chirurgie robotique est l’une des frontières les plus avancées de la médecine moderne. Des bras articulés contrôlés à distance, une caméra 3D haute définition, des instruments effilés qui répliquent les gestes du chirurgien avec une précision millimétrique — ces systèmes permettent d’opérer par des incisions minuscules, de réduire les traumatismes et d’accélérer la convalescence. Derrière cette prouesse technologique, un câblage d’une complexité et d’une précision exceptionnelles : des dizaines de moteurs, de capteurs, de caméras et d’actionneurs interconnectés, dans un environnement stérile, à quelques centimètres d’un patient ouvert.
Ektro fabrique des faisceaux électriques, harnais électriques et torons électriques pour systèmes de chirurgie robotique. Fabriqués dans un atelier à la propreté maîtrisée, avec une traçabilité complète sur chaque composant, nos faisceaux sont conçus pour satisfaire aux exigences de conformité CE, UL, ISO 13485 et IEC 60601. Entreprise familiale française, nous prenons en charge le sourcing des composants adaptés à cette application parmi les plus exigeantes du secteur médical.
La chirurgie robotique : l'application médicale la plus exigeante pour le câblage
Un système de chirurgie robotique cumule les contraintes les plus sévères de l’ensemble du secteur médical.
La sécurité du patient pendant l’intervention. La précision du geste chirurgical, qui dépend directement de la fidélité des liaisons entre les capteurs et les actionneurs. La stérilisation répétée des composants en contact avec le champ opératoire. La durée de vie en cycles d’un système qui peut réaliser plusieurs centaines d’interventions par an. Et le tout dans un volume restreint, avec des câbles qui doivent passer dans des instruments de quelques millimètres de diamètre.
Aucun autre secteur médical ne réunit simultanément toutes ces exigences.

Architecture d'un système de chirurgie robotique : la complexité du câblage
Un système de chirurgie robotique type se compose de plusieurs éléments principaux, chacun avec ses propres exigences de câblage.
La console chirurgien La console est l’interface de commande du chirurgien. Elle embarque des capteurs de mouvement, des systèmes de retour haptique, des écrans haute définition, des commandes de pied. Le câblage de la console connecte plusieurs dizaines d’actionneurs, capteurs et interfaces homme-machine dans un boîtier encombrant mais non stérile.
Le chariot patient et les bras robotiques Le chariot patient porte les bras robotiques qui manipulent les instruments chirurgicaux. Chaque bras est articulé sur plusieurs axes, avec un moteur, un encodeur de position et des capteurs de force à chaque articulation. Le câblage de ces bras doit supporter des millions de cycles de mouvement, dans toutes les directions d’articulation, sans dégradation de la continuité électrique.
Les instruments chirurgicaux Les instruments chirurgicaux robotiques — pinces, ciseaux, porte-aiguille — embarquent dans leur tige de quelques millimètres des câbles qui transmettent la commande des actionneurs distaux et les signaux des capteurs. Ces câbles sont soumis à des cycles de flexion extrêmes, à la stérilisation répétée, et doivent maintenir leur performance pendant toute la durée de vie de l’instrument.
Le système d’imagerie La caméra 3D haute définition placée à l’intérieur du patient transmet des signaux vidéo via des câbles de haute précision. La qualité de l’image dépend directement de l’intégrité de ces liaisons, qui doivent maintenir leurs caractéristiques d’impédance sur toute la durée d’utilisation.
Stérilisation : la contrainte qui change tout

Les composants d’un système de chirurgie robotique en contact avec le champ opératoire doivent être stérilisés entre chaque intervention. Cette exigence a un impact majeur sur la conception du câblage.
Autoclave (vapeur sous pression) La stérilisation à la vapeur sous pression (134°C, 2 bars) est la méthode de référence en chirurgie. Les câbles et connecteurs soumis à des cycles d’autoclave doivent résister à ces conditions sans dégradation des isolants, sans corrosion des contacts métalliques et sans déformation des connecteurs. Les matériaux d’isolation sont sélectionnés pour leur stabilité en cycle thermique humide répété.
Stérilisation à l’oxyde d’éthylène (EtO) Utilisée pour les composants qui ne peuvent pas supporter la vapeur, la stérilisation à l’EtO expose les matériaux à un gaz stérilisant. Les matériaux d’isolation et de gaine doivent être perméables au gaz pour permettre la stérilisation en profondeur, puis dégazer correctement avant utilisation.
Irradiation gamma Utilisée notamment pour la stérilisation des instruments à usage unique, l’irradiation gamma dégrade certains polymères. La sélection des isolants tient compte des doses accumulées sur la durée de vie de l’instrument.
Miniaturisation et haute densité : le câblage dans les instruments chirurgicaux
Les instruments de chirurgie robotique imposent des contraintes de miniaturisation qui n’ont pas d’équivalent dans le reste du secteur médical. Un instrument chirurgical robotique a un diamètre de 5 à 8 millimètres. Dans ce diamètre, il faut faire passer des câbles d’alimentation, des liaisons de capteurs de force, des transmissions de signaux de commande et parfois des câbles de fibre optique pour l’imagerie.
Ces câbles sont soumis à des flexions répétées dans toutes les directions au rythme des mouvements de l’instrument, sur une durée de vie de plusieurs centaines d’interventions. Chaque câble doit maintenir sa continuité électrique, son isolation et ses caractéristiques de signal sur toute cette durée.
La sélection des conducteurs (cuivre multibrin ultra-souple), des isolants (fluoropolymères à faible coefficient de frottement interne) et des techniques d’assemblage est déterminante pour atteindre ces objectifs dans le volume disponible.
Faisceaux haute tension et basse tension en chirurgie robotique
Les systèmes de chirurgie robotique combinent des circuits à niveaux de tension variés. L’alimentation des moteurs des bras robotiques opère à des tensions de plusieurs dizaines de volts avec des courants significatifs. Les circuits de signal des capteurs et encodeurs opèrent à des niveaux beaucoup plus faibles. Les systèmes de coagulation électrochirurgicale intégrés (bipolaire, monopolaire) peuvent opérer à des niveaux haute fréquence haute tension.
La ségrégation de ces différents niveaux de tension dans le câblage des bras et des instruments est un point critique, aussi bien pour la performance du système (immunité des signaux capteurs) que pour la sécurité du patient (courants de fuite vers le champ opératoire).
Ektro maîtrise la conception et la fabrication de faisceaux intégrant ces multiples niveaux de tension, avec les règles de ségrégation et de blindage adaptées à chaque architecture.
Un atelier propre : la condition de la qualité en chirurgie robotique
Un instrument chirurgical robotique sera introduit à l’intérieur d’un corps humain. Un composant électronique ou une particule étrangère dans le câblage d’un instrument ne doit pas compromettre la stérilité du champ opératoire ni la sécurité du patient. Cette exigence de propreté de la fabrication est non négociable.
Ektro fabrique ses faisceaux pour la chirurgie robotique dans un atelier à la propreté rigoureusement maîtrisée : procédures de nettoyage des surfaces de travail, manipulation des composants avec protections adaptées, contrôle des accès à la zone de production médicale, conditionnement final en environnement propre. Cet environnement de fabrication contrôlé est une condition de la conformité de nos faisceaux aux exigences des programmes de chirurgie robotique.
CE, UL, ISO 13485, IEC 60601 : les normes de la chirurgie robotique
Marquage CE — Obligatoire pour la commercialisation des systèmes de chirurgie robotique sur le marché européen au titre du Règlement MDR 2017/745. Les faisceaux Ektro contribuent à la conformité CE du système de nos clients.
Certification UL — Référence de certification pour le marché nord-américain. Nos faisceaux sont fabriqués avec des composants et selon des critères compatibles avec les exigences UL pour les équipements électromédicaux complexes.
ISO 13485 — Norme de management de la qualité pour les dispositifs médicaux. La chirurgie robotique est une application à risque élevé (classe III selon la classification MDR), ce qui impose les exigences les plus strictes sur le système qualité du fabricant et de ses fournisseurs critiques. Ektro structure sa démarche qualité pour répondre à ces exigences.
IEC 60601-1 et IEC 60601-1-2 — Sécurité électrique et compatibilité électromagnétique des équipements médicaux. Pour la chirurgie robotique, les exigences de sécurité électrique sont particulièrement strictes en raison de la proximité immédiate du patient ouvert et des niveaux de tension mis en jeu par les systèmes d’électrochirurgie intégrés.
Traçabilité et sourcing : des exigences maximales pour la chirurgie
Sourcing des composants adaptés Ektro prend en charge l’approvisionnement des composants compatibles avec les exigences de la chirurgie robotique : conducteurs ultra-souples pour les instruments, isolants résistants à la stérilisation, connecteurs miniaturisés haute densité, matériaux biocompatibles pour les zones en contact avec l’environnement patient. Cette maîtrise du sourcing est l’une des valeurs ajoutées essentielles d’Ektro pour les fabricants de systèmes robotiques médicaux.
Traçabilité maximale Pour les dispositifs médicaux de classe III (dont font partie les systèmes de chirurgie robotique), la traçabilité est exigée au niveau le plus granulaire. Chaque composant, chaque lot, chaque opération de fabrication est documenté. Le dossier de fabrication livré avec chaque commande permet d’intégrer le câblage dans le dossier technique du dispositif et de répondre aux exigences de traçabilité post-marché du MDR.
Ektro : un partenaire de développement pour les fabricants de systèmes robotiques médicaux
Développer un système de chirurgie robotique prend des années. Les cycles de qualification, de certification et d’essais cliniques sont longs et exigeants. Les fabricants qui s’engagent dans cette filière ont besoin de partenaires industriels qui comprennent leurs contraintes et qui seront présents sur toute la durée du cycle de développement et de commercialisation.
Ektro est une entreprise familiale française indépendante. Notre modèle nous permet d’être réactifs, engagés et disponibles sur la durée — du prototype de développement jusqu’à la production en série, en passant par les requalifications et les évolutions de définition. Notre atelier à la propreté maîtrisée et notre démarche qualité documentée font de nous un partenaire qualifiable pour les programmes de chirurgie robotique les plus exigeants.
Questions fréquentes
Ektro peut-il fabriquer des câbles pour instruments chirurgicaux destinés à être stérilisés en autoclave ? Oui. La résistance à la stérilisation par vapeur sous pression est un critère de conception des câbles pour instruments chirurgicaux. Les matériaux d’isolation, de gaine et les connecteurs sont sélectionnés pour leur stabilité aux cycles d’autoclave (134°C, humidité saturée) sur le nombre de cycles défini dans le cahier des charges du programme.
Comment Ektro gère-t-il les câbles dynamiques dans les bras robotiques articulés ? Les câbles des bras robotiques sont des câbles dynamiques soumis à des cycles de mouvement répétés dans toutes les directions d’articulation. Leur conception intègre les débattements angulaires, les rayons de courbure et les fréquences de sollicitation définis par le programme. Les conducteurs ultra-souples multibrin, les isolants à faible rigidité et les modes de maintien adaptés sont sélectionnés pour atteindre les durées de vie en cycles requises.
La traçabilité exigée par le MDR pour les dispositifs de classe III est-elle assurée ? Oui. Le dossier de fabrication livré par Ektro avec chaque commande assure la traçabilité complète : identification des composants avec numéros de lot, opérations réalisées, opérateurs, contrôles effectués et résultats. Cette documentation est conçue pour être intégrée dans le dossier technique du dispositif conformément aux exigences MDR 2017/745.
Ektro intervient-il dès la phase de développement ou seulement en production série ? Ektro intervient à toutes les phases : développement (prototypes, maquettes fonctionnelles), qualification (premières séries de qualification, essais de certification), et production série. Notre accompagnement dès la phase de développement permet d’anticiper les contraintes de fabrication et de qualification et d’éviter les refontes coûteuses en fin de cycle.
Un projet de câblage pour système de chirurgie robotique ?
Vous développez ou produisez un système de chirurgie robotique ou un instrument chirurgical connecté et avez un besoin en faisceaux ou harnais électriques ?
Transmettez-nous votre cahier des charges. Notre équipe technique analyse vos contraintes et vous propose une solution adaptée.